Here’s a simple way to use Google Now dynamically with AutoVoice and Tasker
I’ve previously written about how you can use AutoShare to access Google Now searches without having to split your voice command in two. That disables any voice feedback though, as well as other methods, which means that the alternative method- which does actually require you to split your command in two– is preferred by many. Personally, I don’t want to choose, so I merged them.
This is very simple and requires that you read the two articles linked above to actually understand each method. Once you’ve done that, create an AutoVoice Recognized-based profile with something like Google, Search, or something similar (or several) as the command filter.
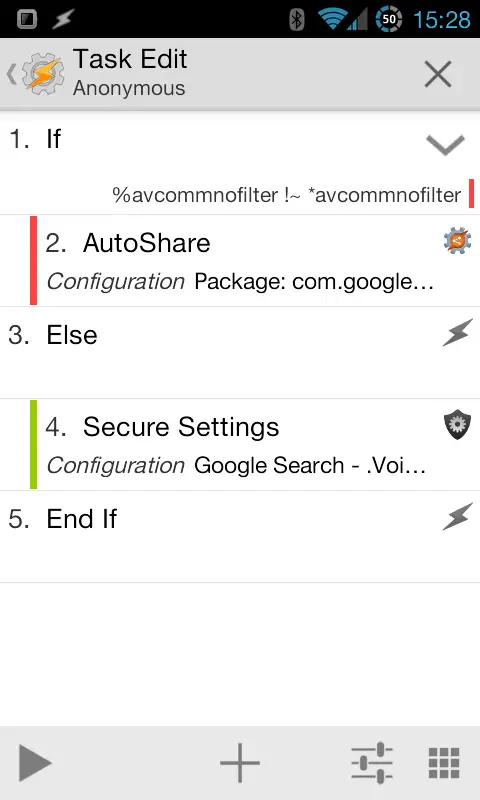
For the task, recreate this:
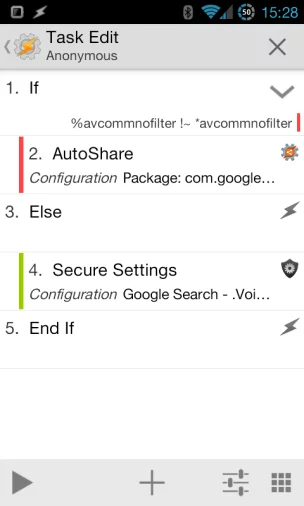
Actions 2 and 4 are the respective main actions from the two previous articles, linked at the beginning.
What this does is simple. If you say just “google” (or whatever your trigger word is), it will open Google Now and start voice recognition, allowing you to speak the rest of your command, and get voice feedback and the other perks with this method. If you just need to do a search, however, you just continue talking, and it will instead use the AutoShare method to push your search query to Google Now without having to wait for Google Now to launch to continue talking. It does this by simply checking if %avcommnofilter is set; if it’s not, it means you stopped talking after you said the trigger word, and that means you want to use the Google Now voice recognition method.
It’s hardly the most advanced Tasker creation ever, but I think it’s a neat little trick, and it works well. This way you can quickly switch between which Google Now method to use, and you don’t even need multiple profiles and triggers.

